El US Army Research Laboratory está experimentando con un vehículo aéreo híbrido no tripulado, que se transforma en vuelo, proporcionando así a los soldados una ventaja en el campo de batalla del futuro.
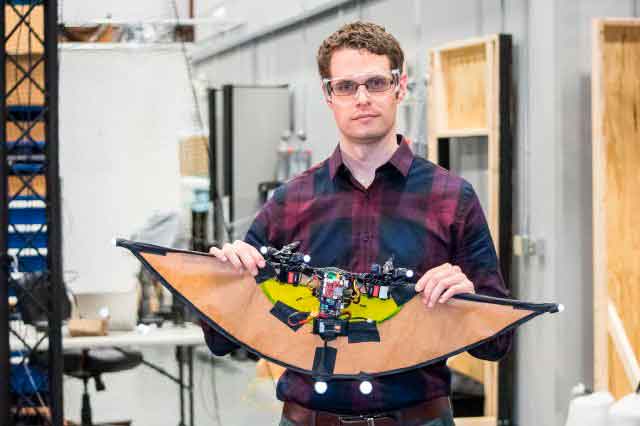
Con un peso de poco más de media libra, este UAV inclina sus rotores para pasar de volar como un helicóptero a acelerar como un avión. El diseño tiene ya muchas eficiencias, pero también ofrece muchos desafíos a su creador, el Dr. Steve Nogar, un investigador postdoctoral del laboratorio Vehicle Technology Directorate.
«En un avión, el peso es todo», dice Nogar. Existen ya un montón de vehículos en los que los diseñadores toman un rotor de cuatro motores y lo grapan a un avión de ala fija. Puede tener propulsores y actuadores adicionales, pero no son muy eficientes. Malgastan peso.
Para las pruebas, Nogar conectó temporalmente un gran semicírculo de papel al prototipo para reducirlo. El diseño final tendrá menos de 10 pulgadas de longitud.
«El diseño del rotor de inclinación es como el del V-22 Osprey, en el que los motores se inclinan», dijo Nogar. El Osprey es un avión militar multi-misión, que inclina los rotores para el despegue vertical y para el aterrizaje. El V-22 tiene más de 57 pies de largo. Reducir esa capacidad a menos de un pie ha sido un desafío debido a la compleja física que rigen el movimiento del vehículo y los métodos de control asociados, dijo Nogar.
Con este UAV híbrido, la transformación del vuelo estacionario a vuelo horizontal ofrece velocidad, agilidad y flexibilidad de misión.
«Mirando al futuro, queremos que se encarame o aterrizaje en algo en el medio ambiente», dijo Nogar. «Lo que significa que tenemos que ser capaces de sentir el ambiente.»
Imagine un futuro drone que sabe aterrizar por sí mismo para ahorrar energía mientras obtiene datos que faciliten la conciencia situacional. El UAV tendrá que ser capaz de detectar paredes, evitar obstáculos y comprender rápidamente su entorno.
«Si va a aterrizar en algo, tiene que saber rápidamente a la velocidad a la que ese lugar se acerca «, dijo. «Necesitaremos capacitar al UAV para sentir y percibir su entorno usando técnicas visuales como el aprendizaje automático».
La construcción de robots implica el dominio del concepto de diseño, la reparación del hardware durante las pruebas y mucho acerca de la programación de software, dijo Nogar, que ha pasado gran parte de su tiempo codificando.
«Me sorprendió un poco, pero en retrospectiva tiene sentido», dijo. «Un robot es una computadora y hay que programar una computadora, la programación es una herramienta básica de la robótica».
El siguiente paso es continuar experimentando, refinando y experimentando más.
«Estos vehículos se integrarán mejor con los soldados», dijo. «Los soldados van a tener que ser capaces de interactuar con estos vehículos todo el tiempo y van a tener que trabajar con ellos en equipo para lograr sus objetivos». Su objetivo puede ser averiguar qué hay sobre la siguiente colina, o explorar las fuerzas enemigas.
«No podemos poner muchos sensores en este vehículo», dijo Nogar. «Básicamente podremos disponer de una sola cámara: se necesita mucho más trabajo para hacer el control y estudiar la dinámica de este vehículo, pero definitivamente nos beneficiará del esfuerzo una vez que haya terminado».
Fte.: US Army